1.7 Worked Example: Derivatives in Kinematics MIT OpenCourseWare 3:08 7 years ago 37 958 Скачать Далее
Kinematics with Calc Position Function to Vel and Acc Elizabeth Kennedy 4:18 7 years ago 55 Скачать Далее
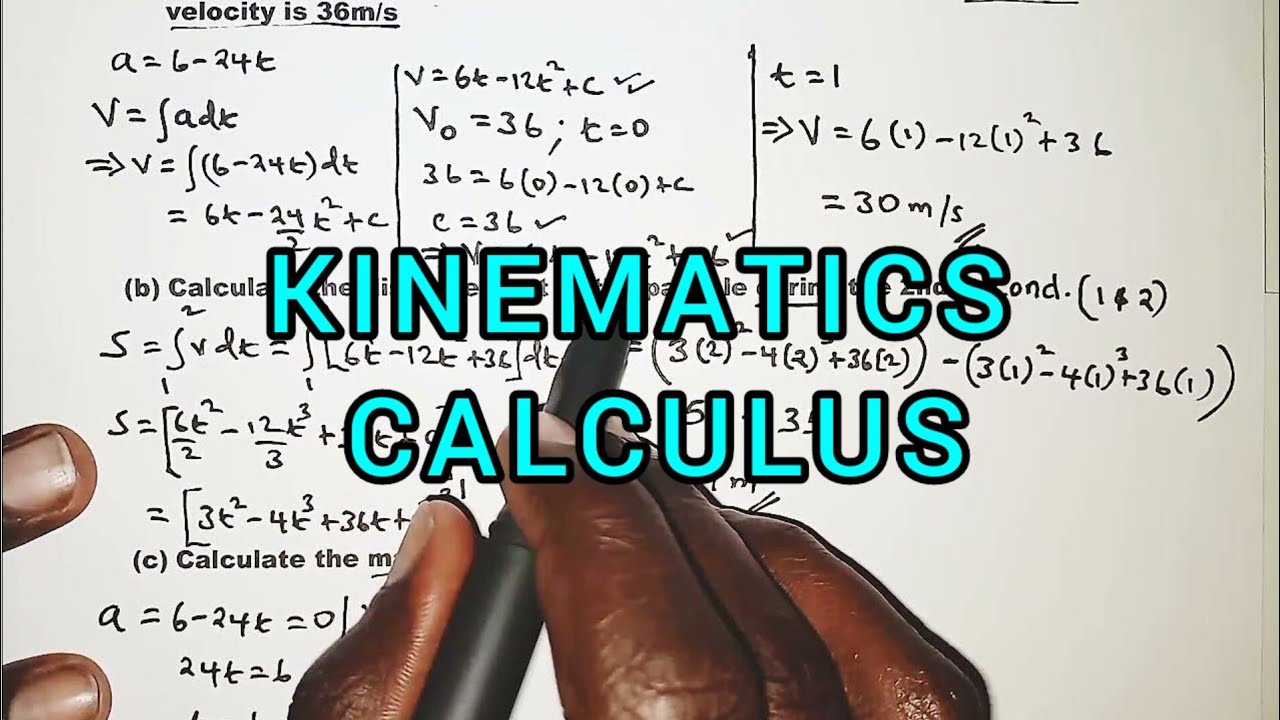
DIFFERENTIATION V|KINEMATICS|DISPLACEMENT|VELOCITY| ACCELERATION|WORKED EXAMPLES EASYMATHS 17:59 4 years ago 126 Скачать Далее
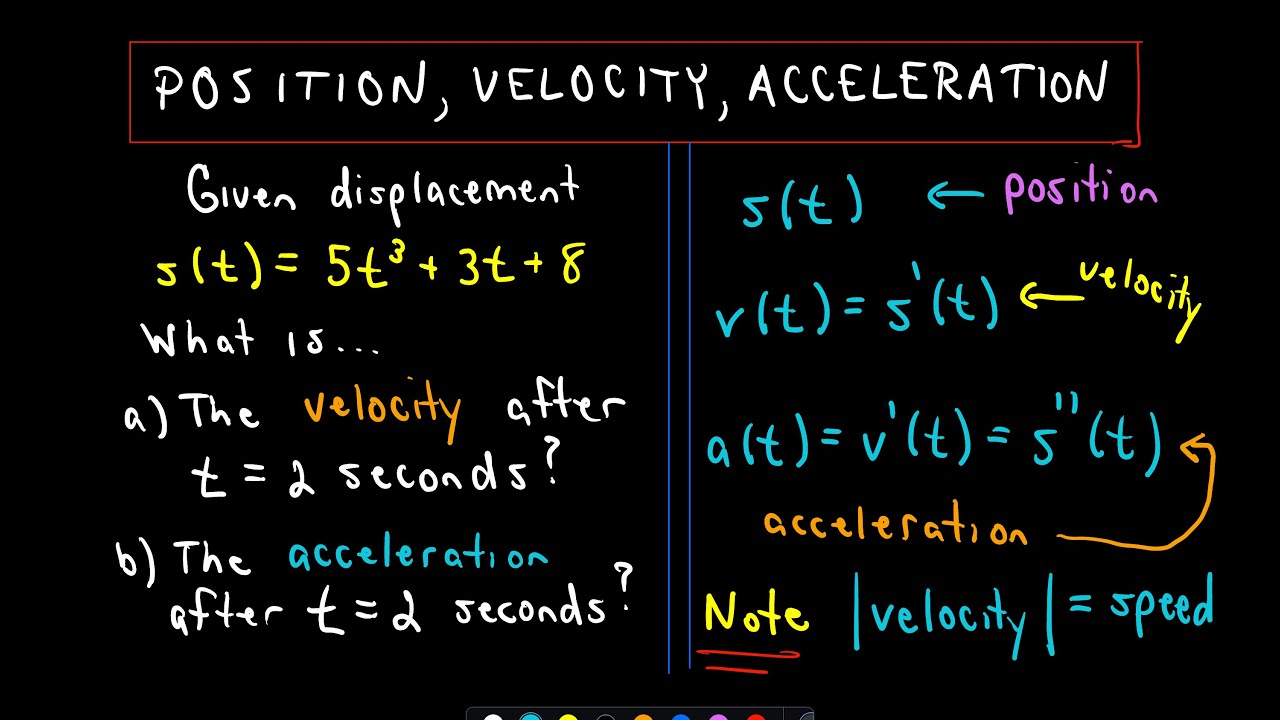
Position, Velocity, Acceleration using Derivatives patrickJMT 8:46 13 years ago 787 648 Скачать Далее
Kinematics variables: derivative and integral relationships for position, velocity, acceleration. Zak's Lab 13:26 2 years ago 504 Скачать Далее
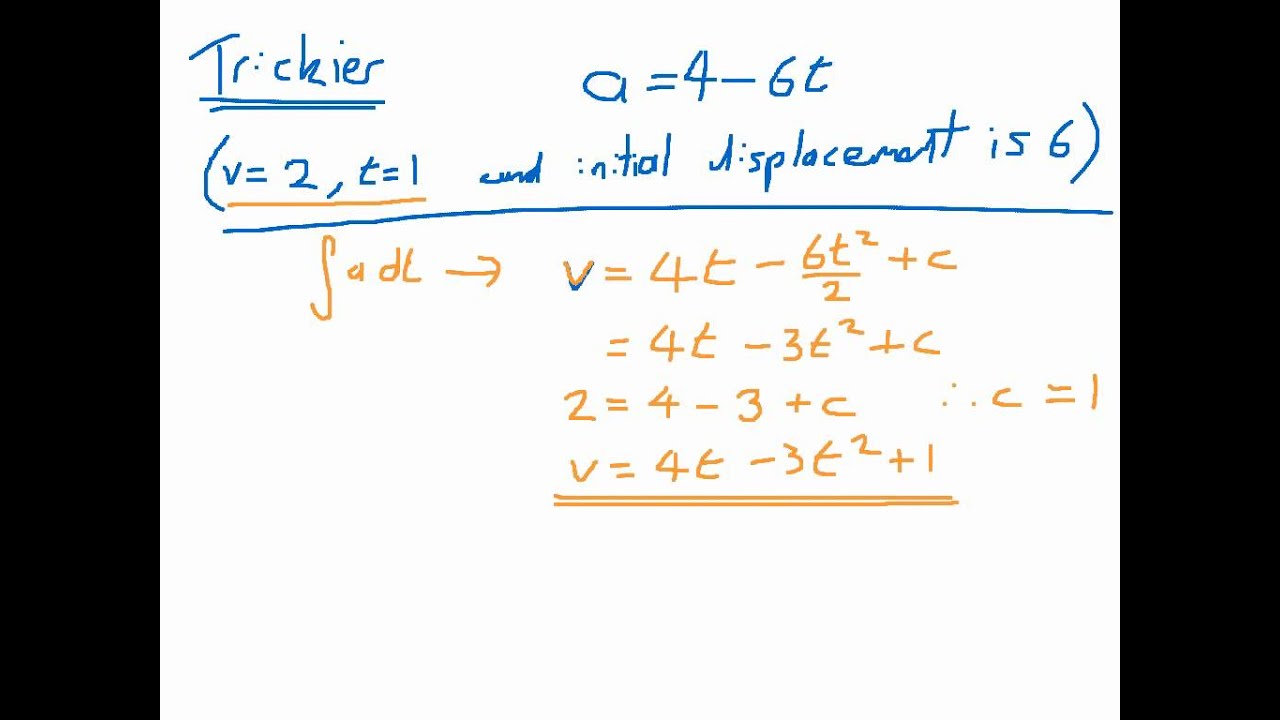
How to use calculus in Kinematics - Displacement, Velocity & Acceleration MathMathsMathematics 10:22 12 years ago 119 553 Скачать Далее
Calculus - Position Average Velocity Acceleration - Distance & Displacement - Derivatives & Limits The Organic Chemistry Tutor 1:16:36 7 years ago 455 554 Скачать Далее
Application of calculus to kinematics / acceleration,velocity, displacement HighMark Mp tutor 19:51 2 years ago 8 134 Скачать Далее
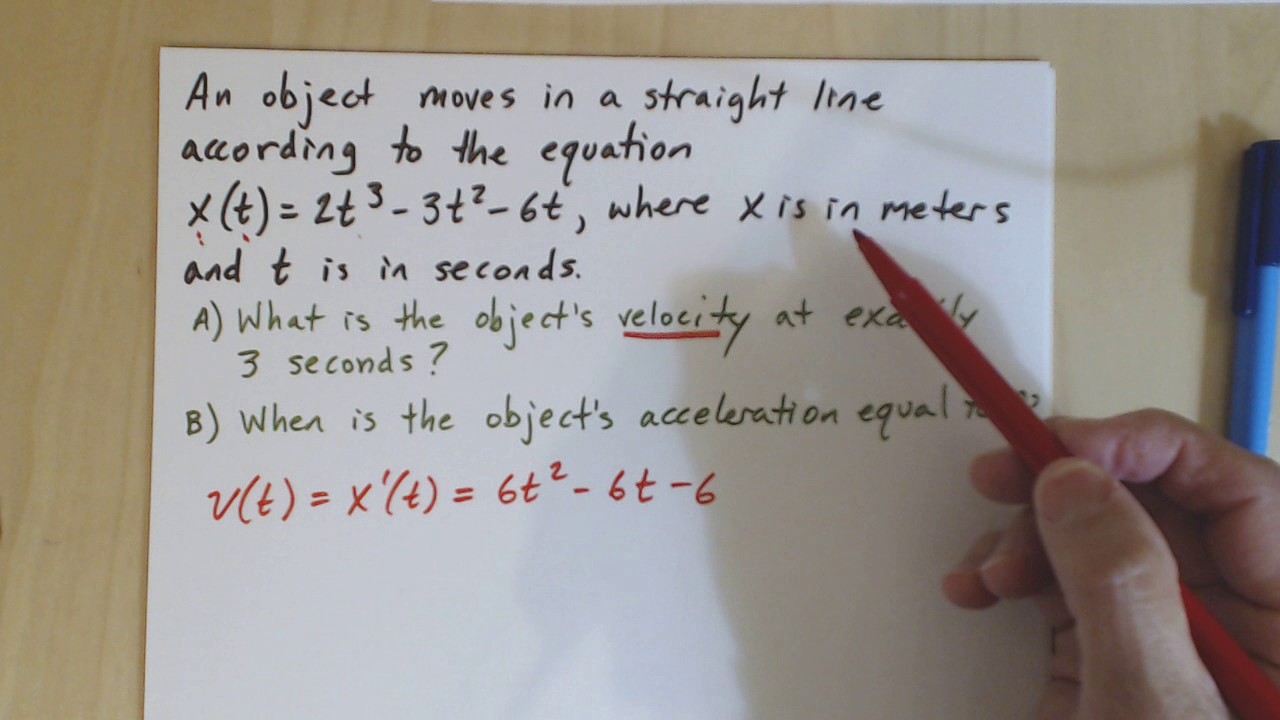
Kinematics Example with Position, Velocity, and Acceleration Math with Dr. Claire 4:47 4 years ago 527 Скачать Далее
Introduction to Kinematics with derivatives Mr Bdubs Math and Physics 19:25 9 years ago 138 Скачать Далее
Kinematic Equations from Calculus Physics with Professor Matt Anderson 3:41 10 years ago 29 971 Скачать Далее
Calculus Based Physics, Derivative and Kinematic Equations Greg Clements 5:42 8 years ago 5 965 Скачать Далее
Higher Order Derivatives of Acceleration: What is Jerk, Snap (Jounce), Crackle, & Pop in Mechanics? Mohammad Shafinul Haque 14:45 3 years ago 26 655 Скачать Далее